ARTICLES

Most robotic case forming cells still depend on custom-built forming structures around the robot. The real challenge is turning carton handling into a stable and repeatable forming process.
Walk through a modern packaging line and it is easy to focus on the visible parts of automation. Robots are palletizing, products are moving through conveyors, and packaging cells are running at high speed with very little operator involvement. Then somewhere earlier in the line, before anything can actually be packed, a flat carton still needs to become a usable box.
At first glance, robotic case forming can look relatively straightforward. A robot equipped with a tool like the CM100 or CM50 picks a flat carton, opens it, and moves it into the next stage of the process. That part is already well understood, but it is not the full application. Once the carton is no longer flat, the process changes. The CM100 or CM50 keeps the case geometry controlled after opening, while the forming station guides the flaps through folding and bottom sealing.
That is where many robotic case forming projects quietly stop being only about the robot and EOAT, and start becoming mechanical engineering projects around the forming process itself.
Opening the carton is only the first controlled step
Once the CM100 or CM50 has picked and opened the carton, the next challenge is no longer just holding the box shape. It is guiding the bottom flaps into the right sequence so the case can be folded and sealed consistently. Inner flaps and outer flaps need to be controlled differently, and that is difficult to solve through robot motion alone.
Without a defined forming structure, integrators often end up building custom guides, folding plates, support fixtures, and taping setups around the robot cell. That part is rarely visible in the marketing photos of robotic case forming systems, but it is often where a large amount of the engineering effort actually goes.
This is also where the application can become difficult to repeat. A setup may work well for one carton format, then require adjustment when the carton size, flap behavior, line layout, or sealing setup changes. The robot and EOAT still handle the carton, but the surrounding forming process starts driving much of the complexity.
It is not unusual for a setup to run perfectly during FAT, then behave differently a few weeks later once carton formats, board quality, or the sealing setup changes. For manufacturers, this can show up as longer commissioning, more changeover work, or packaging cells that behave differently from one line to another. For integrators, it can become repeated onsite tuning, custom fixture work, and additional mechanical design that was never really the core value of the project.
Why many robotic case forming cells become one-off builds
A lot of robotic case forming applications still end up being engineered almost like custom machines. The robot may stay largely the same, and the EOAT principle may stay the same, but around the robot, integrators often redesign the forming mechanics, carton guides, flap folders, support structures, taping integration, and surrounding geometry for each new deployment.
These custom-built structures can also grow into large, fixed setups with a bigger footprint than expected, which starts to undermine one of the reasons many manufacturers look at robotic case forming in the first place. For a single application, that may not seem like a major issue. But once manufacturers start trying to deploy robotic case forming across multiple lines, facilities, or customer sites, the repeated engineering effort, floor space, and layout work add up quickly.
The hidden challenge is usually not opening the carton. It is rebuilding the surrounding forming infrastructure every time the application changes. This is the gap the casemagiQ Station is designed to close.
Replacing custom forming fixtures with a defined forming system
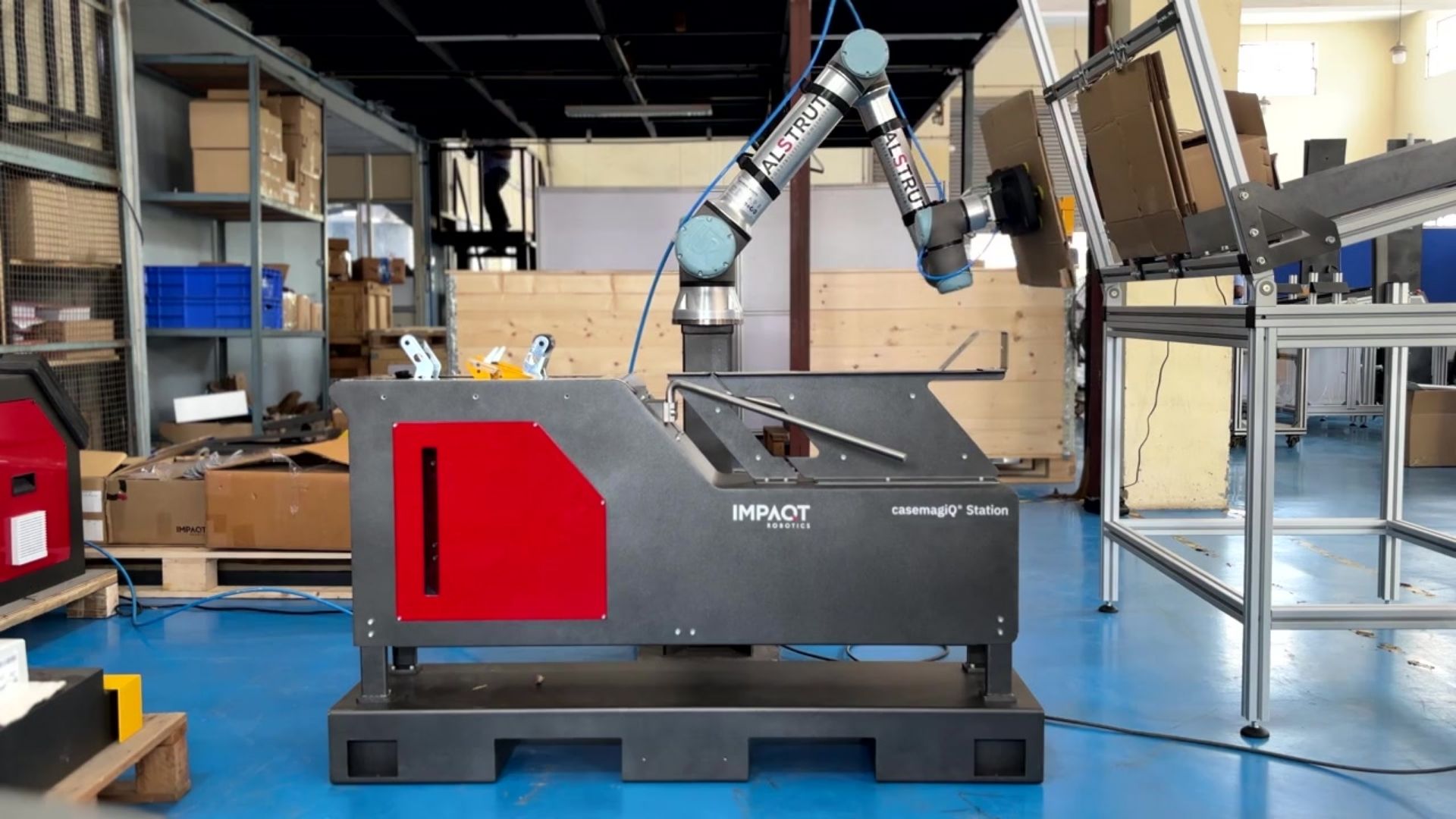
The casemagiQ Station replaces the custom forming infrastructure normally built around robotic case forming applications. Instead of designing separate flap folders, carton guides, support structures, and taping integration for each deployment, the station brings those functions into one defined forming system.
Once the carton enters the station, the sequence becomes mechanically controlled. The inner flaps are folded first, followed by the outer flaps before the carton reaches the integrated taping head for bottom sealing.
In many robotic case forming projects, the surrounding forming process slowly grows into another custom machine around the robot itself. The casemagiQ Station approaches this differently by turning the forming section into a predefined system rather than another fabrication project.
For integrators, that reduces repeated CAD work, custom mechanical design, alignment work, and onsite tuning. For manufacturers, it creates more consistency between lines and reduces the gap between a successful pilot cell and a deployment model that can realistically scale further.
Flexibility only matters if the process stays stable
One of the reasons robotic case forming continues gaining attention is because packaging environments are becoming less fixed than they used to be. More SKUs, shorter production runs, changing carton dimensions, and evolving packaging requirements are pushing manufacturers toward more flexible automation strategies. Traditional carton erectors still make complete sense in many stable, high-throughput environments, especially where formats rarely change. But not every packaging line operates under those conditions anymore.
The challenge is that flexibility alone does not solve much if every new carton format turns into another engineering exercise around the robot cell.
The casemagiQ Station includes adjustable inner flap folders, adjustable outer flap guides, and configurable positioning to support different carton sizes and layouts. The station height can also be adjusted to align with different conveyor heights and production line configurations.
Those details may seem relatively small. In real packaging environments, they are often the difference between a system that can realistically adapt over time and one that slowly becomes harder to maintain every time production requirements shift.
Robotic case forming is more than robot motion
As robotic packaging applications mature, the conversation is gradually shifting away from robots alone and toward the surrounding systems that make robotic processes stable enough for real production. The robot provides the movement. The CM100 and CM50 handle the carton itself. The station creates the controlled forming path that stabilizes the folding and sealing process.
Most robotic case forming applications do not become difficult because the robot cannot open a carton. They become difficult because the surrounding forming process keeps getting rebuilt around every new deployment.
Instead of treating carton forming as another custom mechanical project around the robot, the casemagiQ Station turns the forming process itself into a defined and repeatable system. Once that part becomes stable, another challenge starts becoming equally important: how flat cartons are supplied and presented consistently to the CM100 or CM50 before the cycle even begins.